
Image Credit: NASA
如同加拿大与美国之间在地理位置等方面的特殊关系一样,在美国宇航局 (NASA) 的“光芒”下,加拿大航天局 (CSA) 在宇航方面的贡献也并不是大家常常关注的话题。但是,国际空间站上的机械臂大家都不陌生,而这个设备就是由加拿大航天局主导研制的。
By NASA, Public Domain.
大家可能想到过或者听到过下面这些疑问,看完本文,这些疑问都会逐一解开:
- 国际空间站的机械臂是被固定的吗?能在空间站外面像蠕虫一样爬行移动吗?
- 太空中零重力,所以国际空间站的机械臂可以做得特别细,是真的吗?
- 国际空间站的机械臂有几节?
- 国际空间站的机械臂有什么用?
- 国际空间站的机械臂有多长?
- 国际空间站的机械臂是由谁控制的?

Image Credit: NASA
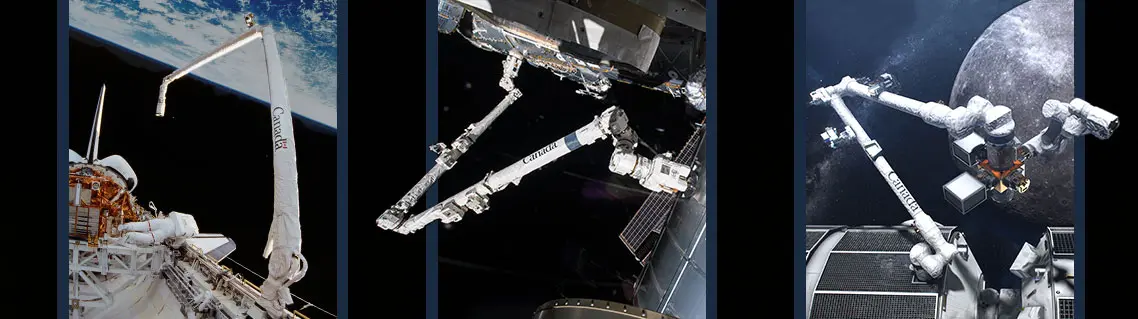
国际空间站机械臂另一个名字叫“加拿大 2 号臂”,有时候可能就简称为“加拿大臂”了。不过,“加拿大臂”其实是一个不太准确的描述——首先,加拿大研制的太空臂,如果算上还没完工的,一共有三种,分别是:“加拿大臂”、“加拿大 2 号臂(加拿大臂 2 号)”和“加拿大 3 号臂(加拿大臂 3 号)”。其中,“加拿大臂”是安装在美国宇航局的航天飞机上的,“加拿大 2 号臂”就是我们现在常见的安装在国际空间站上的,而“加拿大 3 号臂”还没造出来,未来准备用在名为“网关”的月球轨道空间站上,本文重点要介绍的就是“加拿大 2 号臂”。
Credit: Canadian Space Agency/NASA
另一个说“加拿大臂”是一个不太准确的描述是因为,所谓的“加拿大臂”只是国际空间站上一个名为“移动维修系统(Mobile Servicing System)”的设备三大组成部分之一,由于加拿大 2 号臂的出镜率更高,名气最大,所以,在有些时候,加拿大 2 号臂就成了这套移动维修系统对外的特指名称。
国际空间站移动维修系统的三个组成部分,分别是:
- 空间站远距离机械手(Space Station Remote Manipulator),即“加拿大 2 号臂(Canadarm2)”;
- 移动远距离维修基础系统(Mobile Remote Servicer Base System);
- 专用灵巧机械手又称“加拿大手(Canada hand)”。
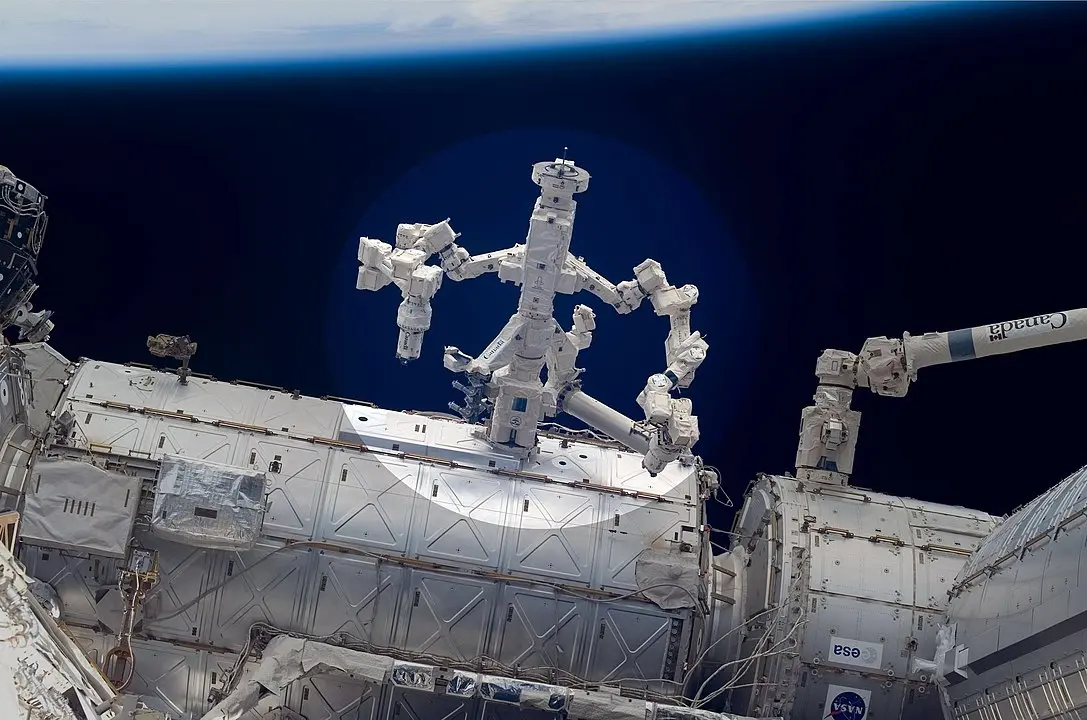
不过,“加拿大手”和加拿大 2 号机械臂并不是始终直接连接在一起的(他们俩可以组合在一起,例如这幅图片。),因此,本文先不讨论“加拿大手”这个装置。
By Penyulap – Own work, CC BY-SA 3.0.
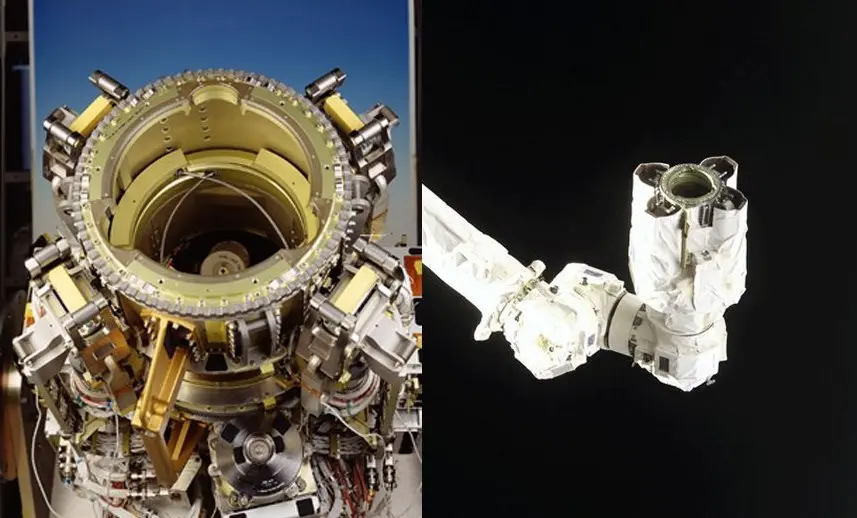
加拿大 2 号机械臂于 2001 年 04 月通过 NASA 的 STS-100 号航天飞机任务运到了国际空间站上,这只机械臂有 7 个关节,总长 17.6 米,总重 1.8 吨,直径 35 厘米,在太空的失重环境下,可以移动质量达 116 吨的物体(在地球重力环境中,它连自己的一个关节都举不起来)。由于加拿大 2 号机械臂几乎不可能在遇到故障后返回地球维修,因此,它的每一个部件都被设计成可以在太空中就完成替换。
By NASA, Public Domain.
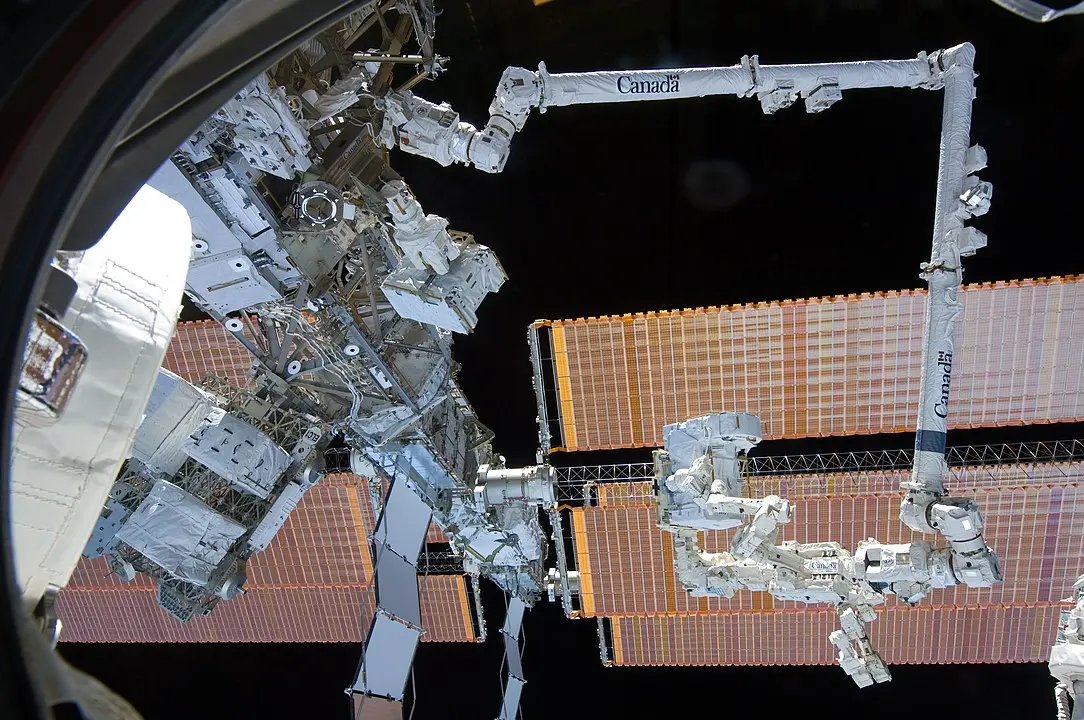
加拿大 2 号机械臂的两端各有一个完全相同的末端执行器,而在国际空间站的外部,一共有 6 个与之配套的连接接口,因此,加拿大 2 号机械臂是可以在国际空间站的外部像蠕虫一样爬行进而抵达国际空间站外部的任何一个位置。中国天宫号空间站的机械臂也被设计成可以爬行的。关于国际空间站机械臂是否可以爬行,NASA 的原话是:
Canadarm2 can easily be commanded to move wherever it needs to go around the ISS. Each of its ends can be used as an anchor point while the other carries out various tasks.
https://www.nasa.gov/mission_pages/station/structure/elements/remote-manipulator-system-canadarm2/
Public Domain.
不过,为了减少移动带来的反作用力对国际空间站的影响并尽可能确保安全,国际空间站的“爬行”速度特别慢,大约为 2.5 厘米每秒。
国际空间站的机械臂有很多用途,例如代替宇航员的出舱太空行走执行站点维护、协助运送补给、设备以及宇航员至国际空间站的其他位置以及抓取要停泊在国际空间站上的飞船等。

By NASA, Public Domain.
至于由谁来控制这只机械臂的问题,其实,加拿大 2 号臂即可以由国际空间站中的宇航员操控,也可以由位于地面上的工作人员“遥控”。

By NASA, Public Domain.
正如本文开头所说,加拿大与美国之间真的是“亲如一家”,因为,这只被冠以“加拿大”之名的机械臂,其实是可以由美国宇航局与加拿大宇航局共同控制的。不过,这已经有进步了,毕竟,“加拿大 2 号臂”的上一代“加拿大臂”是完全由美国控制的。当然,加拿大也想争口气,在加拿大航天局对加拿大机械臂的介绍页面中特别强调了,未来的“加拿大 3 号臂”将由加拿大独立控制(图 10 截图为证~)。
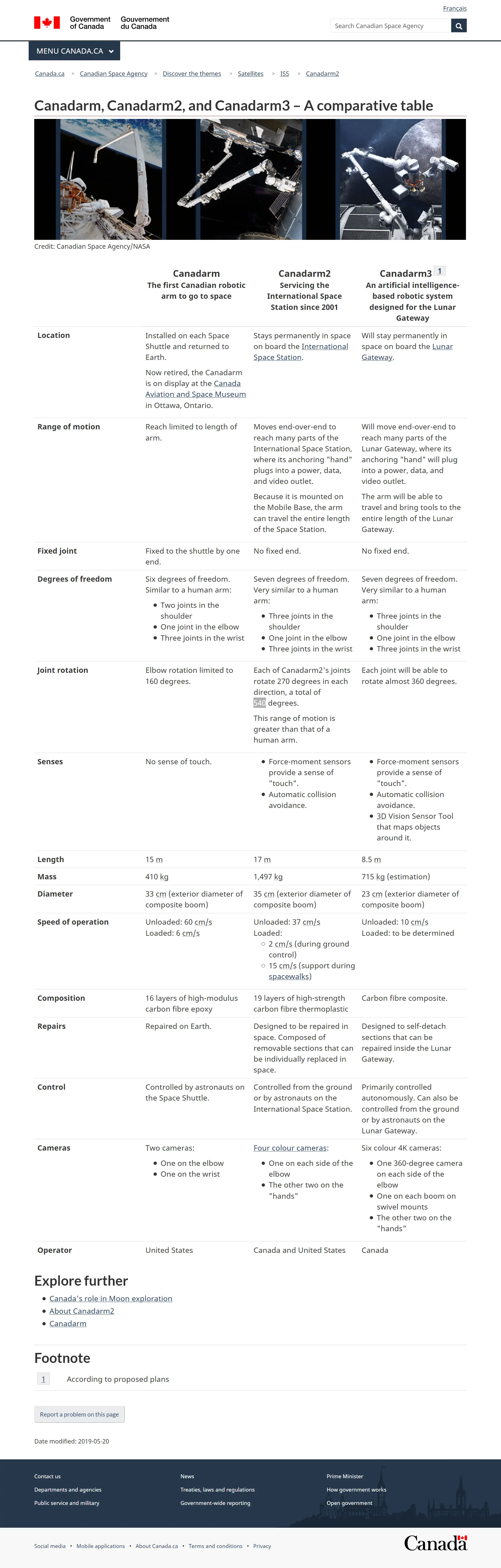
Image From: https://asc-csa.gc.ca/eng/iss/canadarm2/canadarm-canadarm2-canadarm3-comparative-table.asp
参考:
https://asc-csa.gc.ca/eng/iss/canadarm2/canadarm-canadarm2-canadarm3-comparative-table.asp
https://zh.wikipedia.org/wiki/加拿大臂
https://zh.wikipedia.org/wiki/移动维修系统
https://en.wikipedia.org/wiki/Mobile_Servicing_System
https://www.nasa.gov/mission_pages/station/structure/elements/remote-manipulator-system-canadarm2/
本站【科技图鉴】栏目每天早晨五点准时更新
建议您收藏本站,不错过每一份精彩!